Источник - Anastasia Golub
Существует множество источников данных, которые используются для навигации внутри помещений, включая протоколы GPS, WiFi, BLE и т.д. Среди них инерциальная навигация, которая является одним из самых достоверных источников информации для организации позиционирования внутри помещений.
Принцип работы инерциальной системы навигации
Инерциальная система навигации состоит из устройств, методов обработки данных и вычислительных алгоритмов, которые позволяют определять положение конкретного объекта в пространстве и времени. Принципы инерциальной навигации положены в основу инерциального измерительного блока (IMU), используемого Навигационные решения, который состоит из акселерометра, гироскопа и магнитометра. Эти датчики, установленные в большинстве современных мобильных устройств, могут улавливать любое изменение положения человека с телефоном в руке: поворот, встряхивание и движение. Сигналы с данных устройств могут обрабатываться одновременно или по-отдельности, если одно из них недоступно. Для корректной интеграции данных с разных источников измерений необходимо применять механизмы фильтрации. Компания Навигационные решения использует алгоритмы, которые базируются на комплементарном фильтре для обработки данных и сглаживания результатов.
Демо-комплект для indoor-навигации
Попробуйте все возможности навигации внутри помещений с демо-комплектом от "Навигационные решения"!

Акселерометр
Акселерометр измеряет ускорение и предоставляет данные в 3D пространстве. Наиболее распространенные акселерометры предназначены для использования трех одномерных акселерометров, каждый для одного направления. Так же, как и магнитометр, гироскоп получает данные в трех измерениях, но навигация выполняется только в двух измерениях. Именно поэтому, акселерометр имеет решающее значение в определении направления силы тяжести. Измерения от других датчиков могут проецироваться на поверхность, перпендикулярно вектору силы тяжести.
Рис. Акселерометр
Рис. Акселерометр
Педометр
Педометр фиксирует пики амплитуды ускорения тела. Когда пользователь стоит без движения, ускорение остается практически постоянным, но не равным нулю, вследствие силы тяжести. Во время движения можно наблюдать определенные закономерности. Это позволяет обнаруживать шаги. Перед анализом сигналов необходимо произвести предварительную обработку данных, так как некоторые измерения могут содержать шум. Входящие сигналы могут быть очищены с помощью фильтра низких частот и и скорректированы в соответствие с величиной ускорения свободного падения. Шаг определяется с помощью порогового значения. Момент, когда ускорение выходит за пороговое значение, считается началом шага. Когда ускорение опускается ниже порогового значения, фиксируется конец шага. Длина шага рассчитывается путем учета информации об ускорении в начале и в конце шага, времени, затраченном на один шаг, общем времени и общей дистанции.
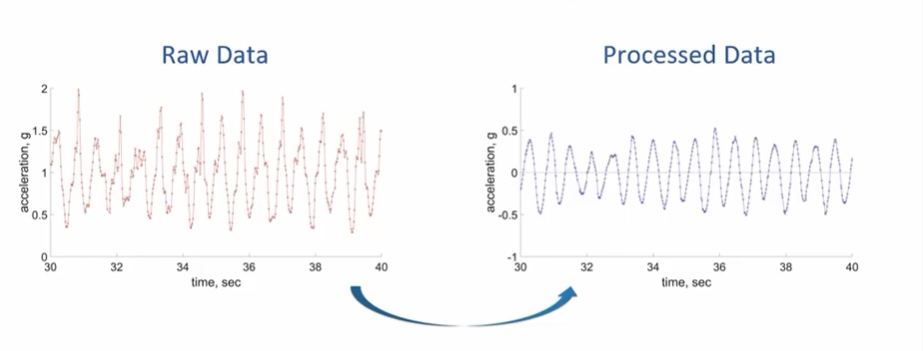
Рис. «Фильтрация шума и настройка значения гравитации» из этого видео.
Гироскоп
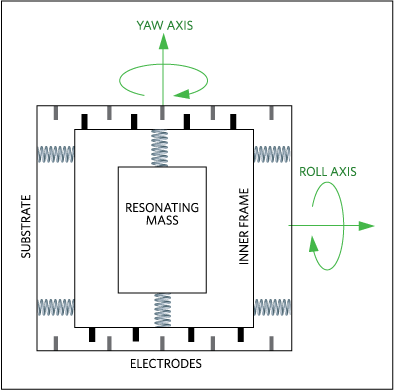
Гироскоп измеряет угловую скорость с помощью эффекта Кориолиса. В зависимости от типа, гироскоп оценивает силу, созданную вращением устройства. С течением времени, угол вращения интегрируется, чтобы вычислить изменение ориентации в течение определенного периода времени. Гироскоп дает более точные данные в краткосрочном периоде навигации по сравнению с магнитометром. Однако когда дело касается более длительного периода, данные гироскопа менее точные из-за накапливания ошибок в процессе интеграции.
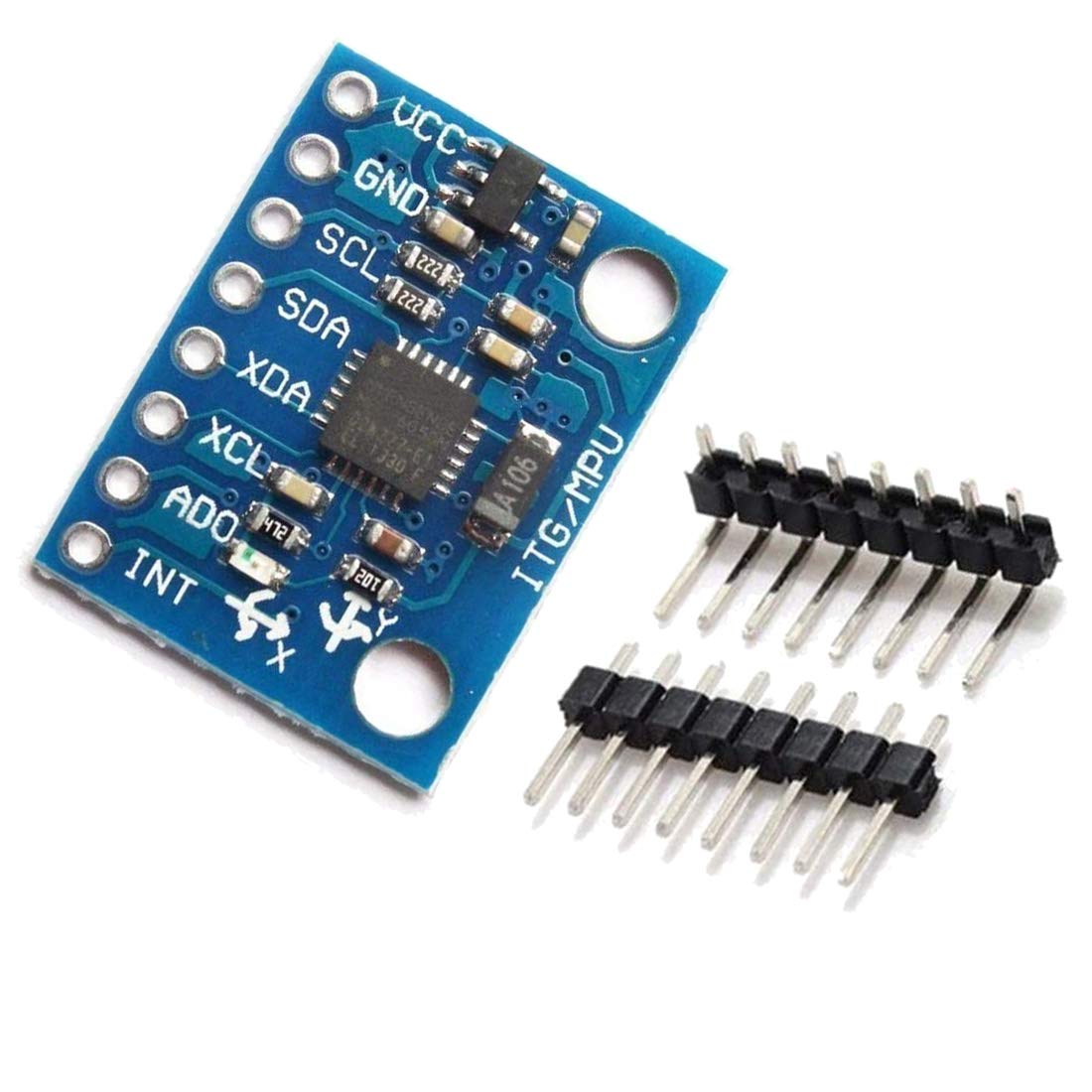
Рис. Гироскоп
Магнитометр
Данный датчик измеряет магнитное поле Земли, используя магнитосопротивление или эффект Холла. Ориентация устройства сопоставляется с северным магнитным полюсом. Таким образом, обеспечивается абсолютная ориентация. Так как металлические объекты внутри строений могут оказывать влияние на магнитное поле, навигация внутри помещений с помощью магнитометра не является достаточно точной.
Рис. Эффект Холла
Сравнение магнитометра и гироскопа
В этом эксперименте измерения поступают от устройства, движущегося по прямоугольной траектории. Как можно видеть, результаты, полученные от гироскопа, ближе к исходным значениям. Однако, на долговременных отрезках можно заметить отклонения угла гироскопа, в то время как магнитометр дает более точные результаты.
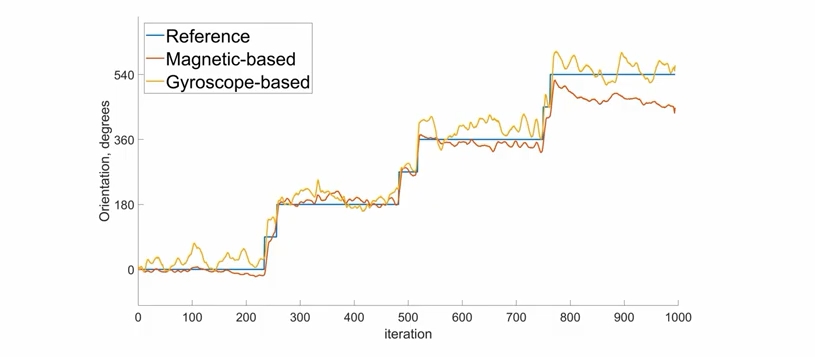
Рис. "Сравнение магнитного и гироскопического подходов» из этого видео
Объединение данных при помощи комплементарного фильтра
Чтобы минимизировать недостатки и компенсировать неточности измерений, полученных с гироскопа и магнитометра, можно использовать комплементарный фильтр. Данные, поступающие с гироскопа, стабильны в течение короткого промежутка времени, поэтому они используются для того чтобы избежать внезапных изменений ориентации, вызванных ошибками измерения магнитного поля. Между тем, особенность магнитометра сохранять стабильность на протяжении продолжительного периода используется для компенсации смещения гироскопа.
Алгоритм счисления координат
Данный алгоритм объединяет результат работы комплементарного фильтра и педометра. Целью алгоритма является восстановление траектории движения человека, движущегося в пространстве с интервалами, соотвествующими измеренной педометром длине шага, в направлении, заданном углом, который получен из комплементарного фильтра.
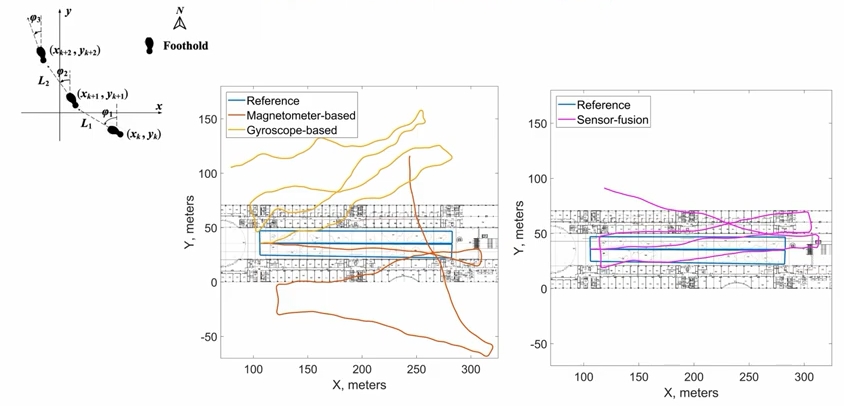
Иллюстрация алгоритма PDR из этого видео
Как можно видеть, дополнительные ошибки позиционирования вызваны педометром, так как прямые линии имеют большую длину по сравнению с контрольными значениями.
Заключение
Инерциальная навигация позволяет определять положение устройства, рассчитывать количество шагов, пройденное человеком, который держит смартфон или смарт-часы, и оценивать повороты во время движения. Алгоритмы инерциальной навигации, такие как шагомер и комплементарный фильтр, помогают улучшить качество навигации внутри помещений. Репозиторий с комплементарным фильтром, педометром и другими алгоритмами можно найти здесь.